






Codesys Ai assistant
Monthly subscription
Rewrite for speed & clarity—instantly. Hit Ctrl + Alt + A and get an optimized program body that preserves intent while cutting dead code and improving loops. No markdown fluff, just clean ST.
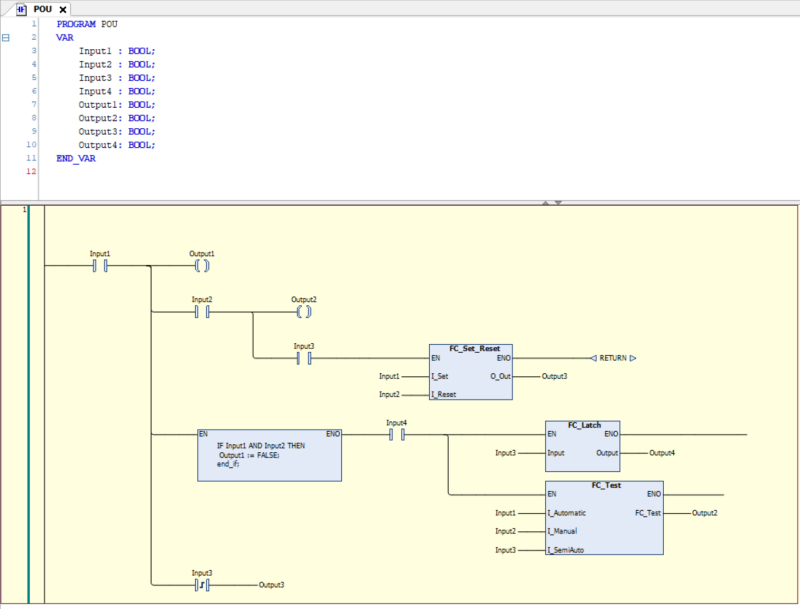
Turn Ladder into ST in seconds. Paste a CODESYS .export and the Assistant converts networks to clear ST, even adding edge-memory vars when needed, then merges/tidies your declarations. Drag-and-drop ready.
Automatic declaration tidy-up. It aligns columns, preserves comments, and comments out unused variables (including a visual highlight), so your VAR blocks finally read like a spec sheet.
One-click safety & determinism checks. Surface race conditions and non-deterministic constructs before they hit the field, delivered as concise, actionable bullets your team can fix fast.
Kill anti-patterns before they cost you hours. Busy waits, deep IF nesting, magic numbers, unsafe casts, the Assistant flags them and tells you the one-line fix.
Built-in lint & metrics when AI can’t respond. Even offline, it detects unused vars, excessive nesting, and unreachable code, then summarizes savings (lines/vars) for your PR notes.
POU generator chat. Describe the module you need; get a full POU back (VAR…END_VAR + body) or JSON blocks, perfect for rapid scaffolding.
Keyboard-driven flow. Ctrl + Alt + A to analyze, Ctrl + Alt + H to hide inputs for a clean “suggested code only” view in demos and code reviews.
Works the way your stack does. Local Ollama support with model pull/probing, temperature control, and language preferences, keep code identifiers in English while localizing comments/UI.